Основные направления разработок
Системы рулевого управления с усилителем находят широкое применение. Однако без применения электроники усилители, как правило, имеют постоянный коэффициент усиления, что негативно сказывается на слишком больших и слишком малых скоростях движения автомобиля: на малой скорости требуются большие усилия на рулевом колесе, а на большой скорости - малые.
Разработки с целью повышения эффективности рулевого управления базируются на прогрессе в области электронной техники и имеют два направления:
- 1) управление, реагирующее на скорость движения автомобиля;
- 2) управление, реагирующее на частоту вращения коленчатого вала двигателя.
В 1-м случае коэффициент усиления изменяется в соответствии со скоростью автомобиля, во 2-м - с частотой вращения коленчатого вала двигателя. В обоих случаях цель изменения состоит в том, чтобы делать более легким управление на низкой скорости и менее чувствительным - на высокой.
Существуют также системы, которые с помощью микроЭВМ позволяют управлять рулевым усилителем по угловой скорости поворота рулевого колеса либо устанавливать его по желанию водителя.
Усилитель EVO
Отделение Saginaw концерна «Дженерал Моторс» разработало и уже серийно выпускает гидравлический усилитель рулевого управления с электронным регулированием, позволяющим изменять усилие на рулевом колесе в зависимости от скорости движения автомобиля. В конструкции заложена возможность настройки самим водителем. Принципиальная схема системы регулирования усилителя Electronic Variable Orifice (EVO) приведена на рис. 68.
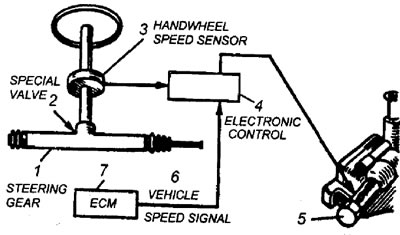
Рис. 68. Принципиальная схема системы регулирования усилителя EVO: 1 - рулевой механизм; 2 - специальный клапан; 3 - датчик углового перемещения рулевого колеса; 4 - ЭБУ; 5 - исполнительный механизм; 6 и 7 - соответственно сигнал и датчик скорости движения автомобиля
Особенностью конструкции нового усилителя является то, что исполнительный механизм может быть установлен либо в насосе усилителя, либо в реечном рулевом механизме. В исполнительном механизме имеется дозирующий шток, перемещение которого относительно жиклера изменяет расход жидкости из насоса усилителя. Перемещением дозирующего штока управляет электронный блок управления, получающий сигналы 6 скорости движения автомобиля от центрального электронного управляющего модуля (датчика) 7.
При увеличении скорости движения автомобиля расход жидкости, подаваемой насосом усилителя, уменьшается. Таким образом обеспечивается небольшое усилие (водителя) на рулевом колесе при низких скоростях движения (при парковке автомобиля) и более высокое - при высоких скоростях движения, что позволяет более точно управлять автомобилем. Контроллер дозирующего штока допускает ступенчатое изменение его положения относительно жиклера, обеспечивая таким образом постепенное увеличение усилия на рулевом колесе по мере роста скорости движения автомобиля.
Электронный блок управления 4 получает также сигналы от датчика 3 углового перемещения рулевого колеса, установленного на рулевой колонке. Этот датчик определяет быстрые изменения угла его поворота. Во время скоростных поворотов рулевого колеса усилитель обеспечивает максимальное снижение усилия на рулевом колесе, облегчая водителю выполнение маневра. Эта система работает при определенных параметрах, заложенных в конструкции.
Свойством нового усилителя является сохранение работоспособности при отсутствии электронного сигнала. В этом случае дозирующий шток немедленно выталкивается из жиклера под давлением масла и усилитель работает на режиме полной мощности при всех скоростях движения автомобиля.
Одной из наиболее интересных особенностей нового усилителя является возможность создания его параметров по требованию заказчика. Характеристики усилителя обеспечиваются изготовителем по желанию потребителя. По заявлению отделения Saginaw, его конструкция может быть выполнена так, что водитель сможет самостоятельно отрегулировать зависимость усилия на рулевом колесе от скорости движения автомобиля в соответствии с индивидуальными требованиями к чувствительности рулевого управления.
Электронный блок рулевого управления с усилением по скорости автомобиля
Блок выполнен в виде аналоговой схемы, изображенной на рис. 69.
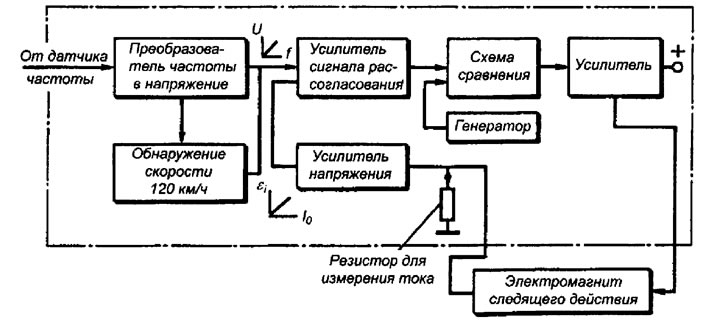
На вход схемы поступает сигнал от датчика скорости. Выходным сигналом ЭБУ является сигнал переменной скважности, приводящий в движение электромагнит следящего действия. Этот электромагнит отличается от обычного тем, что может фиксировать четыре клапана в произвольном положении, пропорциональном среднему току. Управление электромагнитом обеспечивается сигналом с изменяющейся скважностью. Сигнал от датчика скорости с помощью преобразователя частоты в напряжение (f - U) преобразуется в напряжение, пропорциональное скорости, которое легко обрабатывается аналоговой схемой. На высокой скорости для увеличения рулевого усилия ток электромагнита должен расти. Но чтобы не допускать чрезмерного увеличения рулевого усилия на больших скоростях, значение тока остается неизменным при скорости выше 120 км/ч. Для этого вводится схема обнаружения скорости 120 км/ч. Напряжение U, полученное в результате преобразования сигнала датчика скорости, напряжение еi пропорциональное падению напряжения (образуемому током l0 через электромагнит) на резисторе для измерения тока, сравниваются в усилителе сигнала рассогласования. Усилитель, содержащий интегрирующую схему на операционном усилителе, вырабатывает сигнал, скорректированный таким образом, что при наличии рассогласования через электромагнит всегда протекает ток, пропорциональный скорости. Схема сравнения в результате обработки скорректированного сигнала и сигналов треугольной формы е0 генератора вырабатывает импульсы, скважность которых пропорциональна скорости. Этот сигнал через транзистор поступает на электромагнит. С увеличением тока степень открытия электромагнитного клапана и рулевое усилие возрастают.